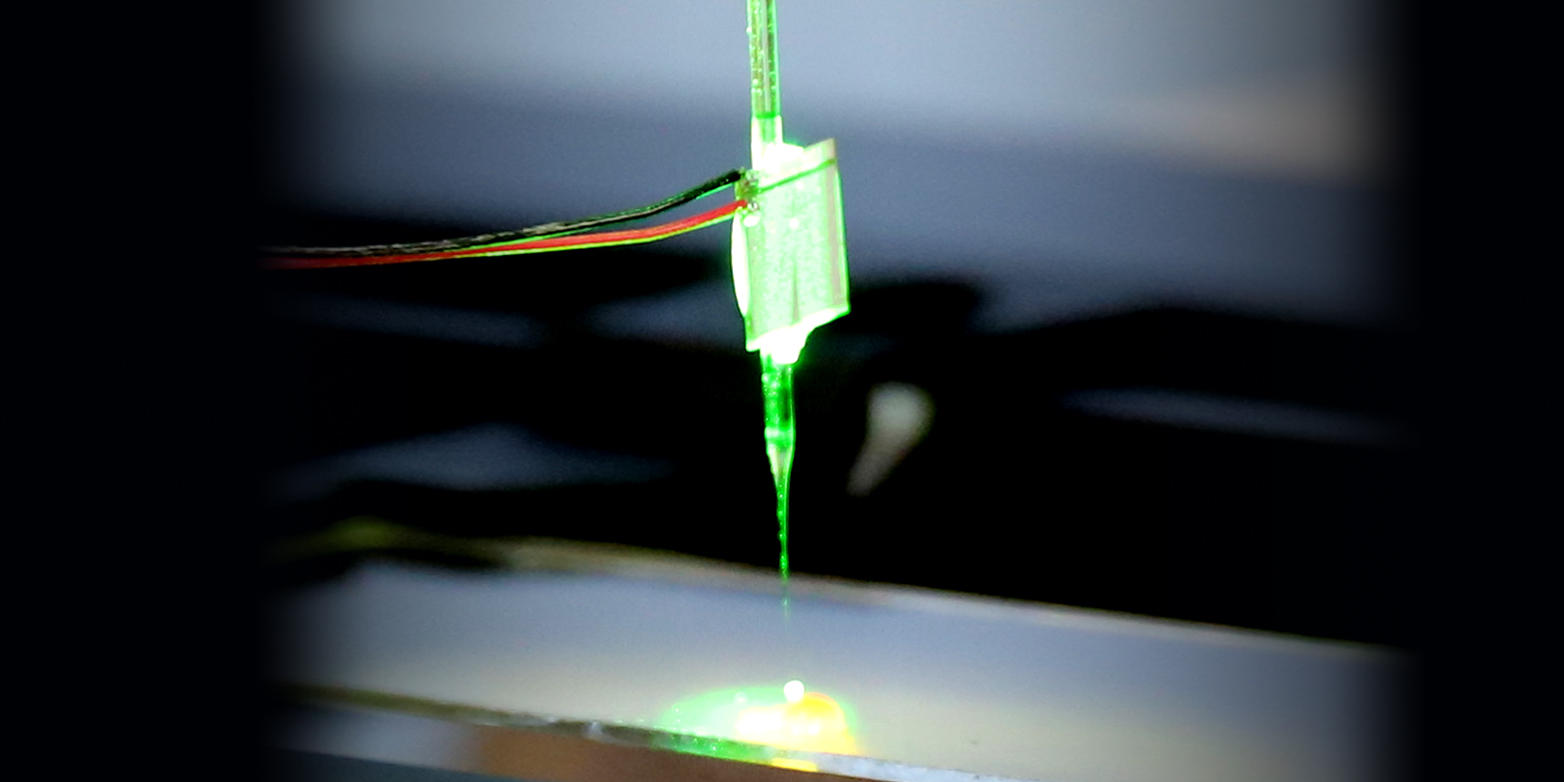
The usage of a pitcher needle made to oscillate with the help of ultrasound, liquids may also be manipulated and debris may also be trapped. Credit score: ETH Zurich
Maximum folks are acquainted with robots that possess movable fingers. Those machines are regularly present in manufacturing facility settings and are able to acting more than a few mechanical duties. They may be able to be programmed to accomplish a variety of purposes, and a unmarried robotic can perform a couple of duties.
Up till now, robots supplied with movable fingers have had restricted connections with microfluidic programs that shipping tiny amounts of liquid thru subtle capillaries. Those programs, referred to as microfluidics or lab-on-a-chip, had been created through researchers to help in laboratory research and generally depend on exterior pumps to flow into the liquid throughout the chips. Then again, automating such programs has been difficult, and the chips needed to be custom-designed and manufactured for every particular person utility.
Ultrasound needle oscillations
Scientists led through ETH Professor Daniel Ahmed at the moment are combining typical robotics and microfluidics. They’ve advanced a tool that makes use of ultrasound and may also be hooked up to a robot arm. It’s appropriate for acting a variety of duties in microrobotic and microfluidic programs and may also be used to automate such programs. The scientists have reported in this building in Nature Communications.
The device comprises a thin, pointed glass needle and a piezoelectric transducer that causes the needle to oscillate. Similar transducers are used in loudspeakers, ultrasound imaging, and professional dental cleaning equipment. The ETH researchers can vary the oscillation frequency of their glass needles. By dipping the needle into a liquid they create a three-dimensional pattern composed of multiple vortices. Since this pattern depends on the oscillation frequency, it can be controlled accordingly.
The researchers were able to use this to demonstrate several applications. First, they were able to mix tiny droplets of highly viscous liquids. “The more viscous liquids are, the more difficult it is to mix them,” Professor Ahmed explains. “However, our method succeeds in doing this because it allows us to not only create a single vortex but to also efficiently mix the liquids using a complex three-dimensional pattern composed of multiple strong vortices.”
Second, the scientists were able to pump fluids through a mini-channel system by creating a specific pattern of vortices and placing the oscillating glass needle close to the channel wall.
Third, they succeeded in using their robot-assisted acoustic device to trap fine particles present in the fluid. This works because a particle’s size determines its reaction to the sound waves. Relatively large particles move toward the oscillating glass needle, where they accumulate. The researchers demonstrated how this method can capture not only inanimate particles but also fish embryos. They believe it should also be capable of capturing biological cells in the fluid. “In the past, manipulating microscopic particles in three dimensions was always challenging. Our microrobotic arm makes it easy,” Ahmed says.
“Until now, advancements in large, conventional robotics and microfluidic applications have been made separately,” Ahmed says. “Our work helps to bring the two approaches together.” As a result, future microfluidic systems could be designed similarly to today’s robotic systems. An appropriately programmed single device would be able to handle a variety of tasks. “Mixing and pumping liquids and trapping particles – we can do it all with one device,” Ahmed says. This means tomorrow’s microfluidic chips will no longer have to be custom-developed for each specific application. The researchers would next like to combine several glass needles to create even more complex vortex patterns in liquids.
In addition to laboratory analysis, Ahmed can envisage other applications for microrobotic arms, such as sorting tiny objects. The arms could conceivably also be used in biotechnology as a way of introducing DNA into individual cells. It should ultimately be possible to employ them in additive manufacturing and 3D printing.
Reference: “A robot-assisted acoustofluidic end effector” by Jan Durrer, Prajwal Agrawal, Ali Ozgul, Stephan C. F. Neuhauss, Nitesh Nama and Daniel Ahmed, 26 October 2022, Nature Communications.
DOI: 10.1038/s41467-022-34167-y
Supply Via https://scitechdaily.com/combining-robotics-and-microfluidics-a-precision-arm-for-miniature-robots/